
सेंटीपीड एक रेंगने वाला जीव है। कुछ मिलीमीटर से लेकर 30 सेंटीमीटर लंबे और अनेक टांगों वाले ये जीव विभिन्न परिवेशों में पाए जाते हैं। यह अकशेरुकी जीव रेत, मिट्टी, चट्टानों और यहां तक कि पानी पर भी दौड़ सकता है। जॉर्जिया इंस्टीट्यूट ऑफ टेक्नॉलॉजी के जीव विज्ञानी डेनियल गोल्डमैन और उनके सहयोगी सेंटीपीड की इस विशेषता का अध्ययन कर रहे थे। हाल ही में टीम ने सोसाइटी ऑफ इंटीग्रेटिव एंड कम्पेरेटिव बायोलॉजी की बैठक के दौरान बताया कि उन्होंने एक ऐसा सेंटीपीड रोबोट तैयार किया है जो खेतों से खरपतवार निकालने में काफी उपयोगी साबित होगा।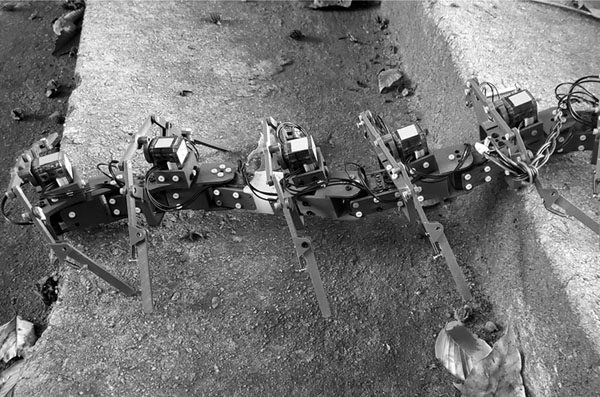
दरअसल, सेंटीपीड का लचीलापन ही उसे विभिन्न प्रकार के व्यवहार प्रदर्शित करने में सक्षम बनाता है। वैसे नाम के अनुरूप सेंटीपीड के 100 पैर तो नहीं होते लेकिन हर खंड में एक जोड़ी टांगें होती हैं। यह संरचना उन्हें तेज़ रफ्तार और दक्षता से तरह-तरह से चलने-फिरने की गुंजाइश देती है हालांकि सेंटीपीड की चाल को समझना लगभग असंभव रहा है।
गोल्डमैन के एक छात्र इलेक्ट्रिकल इंजीनियर और रोबोटिक्स वैज्ञानिक यासेमिन ओज़कान-आयडिन ने जब यह पता किया कि कई खंड और टांगें होने का क्या महत्व है तो अध्ययन का तरीका सूझा। इसके लिए ओज़कान-आयडिन ने चार पैर वाले दो-तीन रोबोट्स को एक साथ जोड़ दिया। साइंस रोबोटिक्स में प्रकाशित रिपोर्ट के अनुसार यह संयुक्त मशीन चौड़ी दरारों और बड़ी-बड़ी बाधाओं को पार करने के सक्षम थी। इसके अलावा युनिवर्सिटी की एक अन्य छात्र एवा एरिकसन ने अन्य जीवों की तुलना में सेंटीपीड की चाल को और गहराई से समझने का प्रयास किया। गौरतलब है कि घोड़े और मनुष्य अपनी रफ्तार बढ़ाने के लिए अपने पैरों अलग-अलग ढंग से चलाते हैं। वीडियो ट्रैकिंग प्रोग्राम का उपयोग करते हुए एरिकसन ने बताया कि सेंटीपीड अपनी चाल में परिवर्तन उबड़-खाबड मार्ग की चुनौतियों के अनुसार करता है।
आम तौर पर सेंटीपीड के पैर एक तरंग के रूप में चलते हैं। लेकिन कई बार इस तरंग की दिशा में परिवर्तन आता है। समतल सतहों पर इस लहर की शुरुआत पिछले पैर से होते हुए सिर की ओर जाती है लेकिन कठिन रास्तों पर इस लहर की दिशा बदल जाती है और कदम जमाने के लिए सबसे पहले आगे का पैर हरकत में आता है। और तो और, प्रत्येक पैर ठीक उसी स्थान पर पड़ता है जहां पिछला कदम पड़ा था।
सेंटीपीड खुद को बचाने के लिए पानी पर तैरने में भी काफी सक्षम होते हैं। तैरने के लिए भी वे अपनी चाल में परिवर्तन करते हैं। लिथोबियस फॉरफिकैटस प्रजाति का सेंटीपीड अपने पैरों को पटकता है और फिर अपने शरीर को एक ओर से दूसरी ओर लहराते हुए आगे बढ़ता है। यहां दो तरंगें पैदा होती हैं - एक पैरों की गति की तथा दूसरी शरीर के लहराने की। इन दो तरंगों के बीच समन्वय को समझने के लिए एक अन्य छात्र ने गणितीय मॉडल का उपयोग किया। इस मॉडल में पैरों और शरीर की तरंगों के विभिन्न संयोजन तैयार किए गए। पता चला कि दो तरंगों के एक साथ चलने की बजाय इनके बीच थोड़ा अंतराल होने पर रोबोट अधिक तेज़ी से आगे बढ़ता है। इसी तरह से कुछ संयोजनों से रोबोट को पीछे जाने में भी मदद मिलती है।
गोल्डमैन और टीम ने इसको आगे बढ़ाते हुए बताया कि यदि रोबोट के पैरों में जोड़ हों और शरीर के खंडों में लोच हो तो रोबोट ज़्यादा बेहतर काम कर सकता है। गोल्डमैन द्वारा तैयार किए गए वर्तमान रोबोट काफी लचीले हैं और वे किसी भी स्थान के कोने-कोने तक पहुंच सकते हैं। आगे वे इन्हें प्रशिक्षित करना चाहते हैं ताकि वे खरपतवार को पहचान सकें और निंदाई का काम कर सकें। (स्रोत फीचर्स)
-
Srote - April 2022
- नए शोधों से मिले रोगों के नए समाधान
- आंत के सूक्ष्मजीव अवसाद का कारण हैं
- हृदय पर कोविड-19 के गंभीर प्रभाव
- कोविड-19 की उत्पत्ति पर बहस जारी
- बुज़ुर्गों में नींद उचटने का कारण
- पाकिस्तान का पोलियोवायरस अफ्रीका पहुंचा
- जीएम खाद्यों पर पूर्ण प्रतिबंध ही सबसे उचित नीति है
- फफूंद से सुरक्षित है जीन-संपादित गेहूं
- भारत के जंगली संतरे
- साफ-सफाई की अति हानिकारक हो सकती है
- रेडियोधर्मी कचरे का एक लाख वर्ष तक भंडारण!
- जलवायु परिवर्तन से अनुकूलन: बांग्लादेश से सबक
- गुमशुदा मध्ययुगीन साहित्य की तलाश
- सूर्य के पड़ोसी तारे का पृथ्वी जैसा ग्रह मिला
- समुद्री ध्वनियों की लाइब्रेरी की तैयारी
- पृथ्वी और मानवता को बचाने के लिए आहार
- कम खाएं, स्वस्थ रहें
- सेंटीपीड से प्रेरित रोबोट्स
- बाल्ड ईगल में सीसा विषाक्तता
- डायनासौर का अंत वसंत ऋतु में हुआ था
- भारी-भरकम डायनासौर की चाल
- छिपकली की पूंछ की गुत्थी
- सूरजमुखी के पराबैंगनी रंगों की दोहरी भूमिका